|
Результат выполнения научно-исследовательской работы.Устройство для управления роботом-манипулятором, содержащее кнопки управления, переключающее реле, конечные выключатели для предотвращения выхода рабочего органа за допустимые рамки и для определения его положения, имеет три вида блокировки: в автоматическом режиме -го логическая блокировка в виде логической цепочки на элементах "ИЛИ - НЕ", "И", в ручном режиме - блокировка посредством размыкающих контактов кнопок sb1 и sb2 и с помощью нормально замкнутых контактов kv1.1 и kv2.1. Для сопряжения с компьютером используется параллельный порт, выводы которого соединены с шиной данных микропроцессора. Для переключения в ручной и автоматический режимы используются реле. Устройство управления роботом-манипулятором представлено на чертежах, где изображено: Фиг.1 - устройство управления роботом-манипулятором; 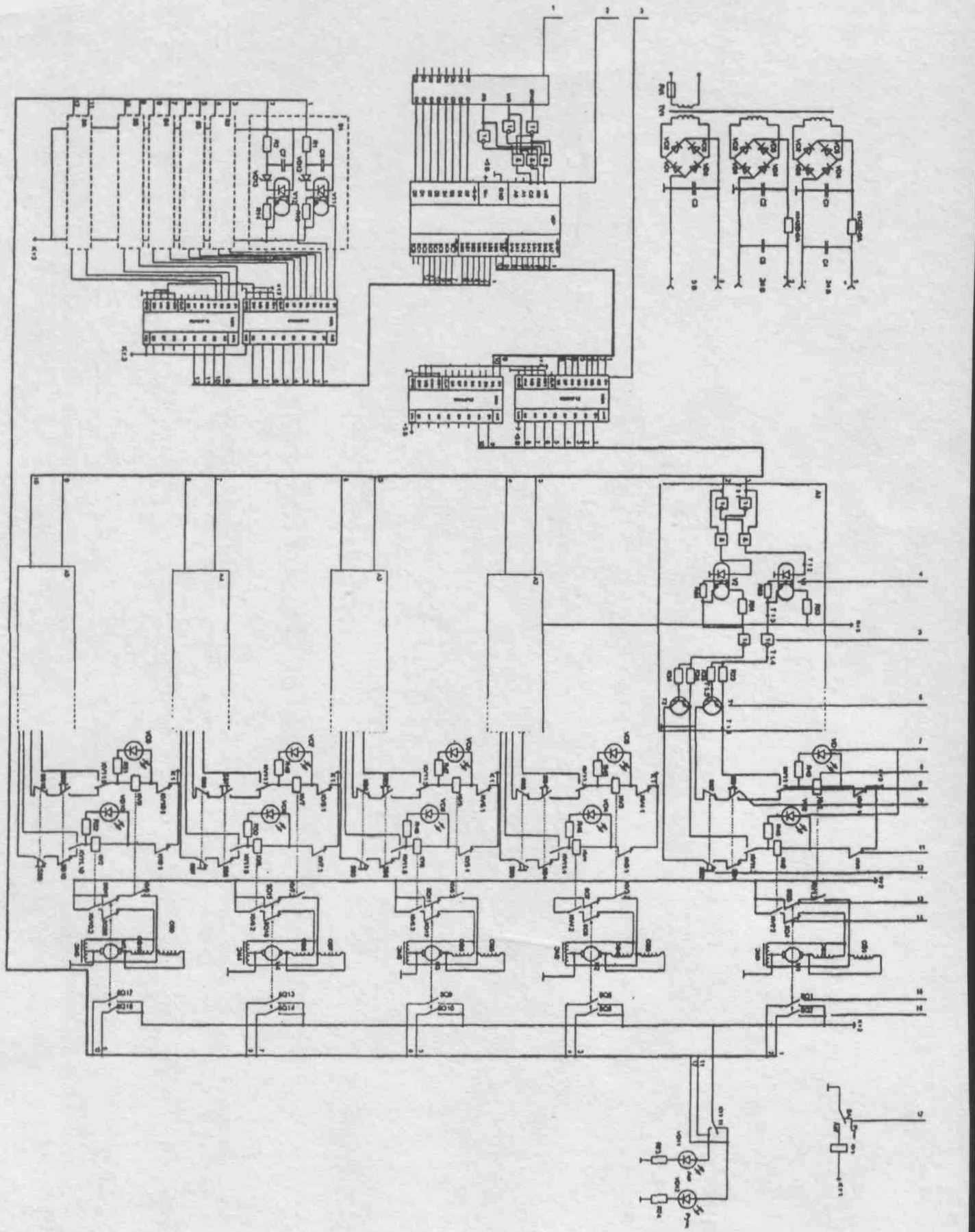
Фиг.2 - логическая блокировка. 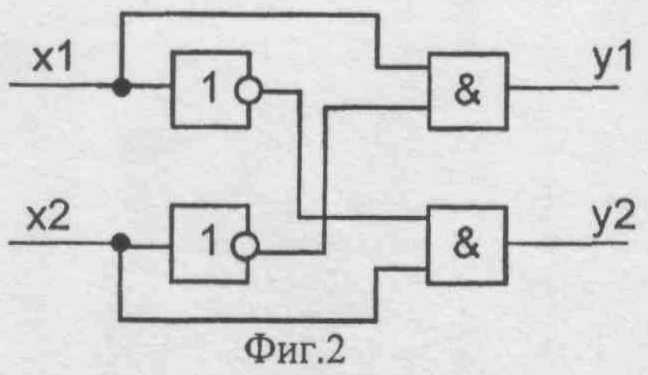
В устройство управления роботом-манипулятором входят (фиг.1): параллельный порт -1, интерфейс - 2, буферный регистр - 3, оптопара - 4, логический элемент "НЕ" - 5, транзистор - 6, светодиод - 7, переключатель kv11.1 - 8, промежуточные реле kv1 - 9, кнопка управления sb1 -10, нормально замкнутый контакт kv1.1 -11, кнопка управления sb2 -12, конечный выключатель sq3 -13, конечный выключатель sq4 -14, конечный выключатель sq1 -15, конечный выключатель sq2 -16, переключатель в автоматический или ручной режим sa-17. Устройство работает следующим образом. Для сопряжения с компьютером предусмотрен параллельный порт 1, входы которого соединяются с шиной данных микропроцессора. В качестве интерфейса 2 используется микросхема КР 580ВВ55А. Данная микросхема работает в режиме простого ввода/вывода, то есть осуществляется программно управляемая передача данных через два восьмиразрядных канала ВА и ВВ, а также через два четырехразрядных канала ВС. Для упрощения работы микросхемы используются буферные регистры 3 серии К589ИР12. Два буферных регистра используются для вывода информации и два - для ввода. Информация с конечных выключателей (sq1(15), sq2(16)) поступает на интерфейс 2, а управляющие сигналы - через оптическую развязку, усилительные транзисторы, работающие в ключевом режиме, идут на промежуточные реле (9) kv1 - kv10. Каждый привод реверсивный - осуществляет движение (поворот) в ту или иную сторону. Для исключения одновременной подачи управляющих сигналов на один привод используется цепочка на логических элементах "ИЛИ - НЕ", "И" (см. фиг.2), стоящая перед оптопарой (4). После данной цепочки сигнал идет на оптопару v1 (4) (или v2), а затем на элемент "НЕ" (5). Далее через резисторы - на транзисторы Т1 (6) или Т2. Переключатель kv11.1(8) служит для переключения в автоматический или ручной режим управления. В ручном режиме при нажатии кнопки sb1(10) замыкается цепь питания промежуточного реле kv1(9). Начинается движение рабочего органа в одном направлении. Для предотвращения одновременного включения промежуточных реле одноименного канала в ручном режиме служат также размыкающие контакты кнопок sb1(10) и sb2(11). Всхеме управления приводом применены три вида блокировки: логическая блокировка в автоматическом режиме, блокировка по средствам размыкающих контактов кнопок sb1(10) и sb2(11), нормально замкнутые контакты kv1.1 и kv2.1(12). Для индикации движения рабочего органа служат светодиоды vd(7). Для переключения в автоматический или ручной режим служит переключатель sa(17). Для предотвращения выхода исполнительного механизма за допустимые пределы последовательно в цепи питания привода ставятся конечные выключатели sq3(13), sq4(14). При подходе механизма к допустимому пределу sq3(13) или sq4(14) размыкается - цепь питания ОВ разрывается, двигатель прекращает движение. Расположение конечных выключателей sq3(13) или sq4(14) устанавливается на заводе-изготовителе и изменению нем подлежит. Конечные включатели sq1(15) и sq2(16) служат для настройки необходимого хода. Предлагаемое устройство позволяет увеличить качество управления роботом-манипулятором. Данное устройство может быть реализовано промышленным способом на основе стандартной элементарной базы.
|



