ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 63-035-05 |
|||
|
Наименование проекта Импульсно-доплеровская радиолокационная станция ИД ЛС |
|||
|
Назначение Для расширения функциональных возможностей ИД РЛС за счет распознования боевого порядка БП групповой воздушной цели ГВЦ и определения ее ракурса |
|||
|
Рекомендуемая область применения Определение местоположения объектов в воздухе, на воде или на земле в военной технике, на морском, речном и воздушном транспорте. в астрологии, космонавтике, метеорологии |
|||
|
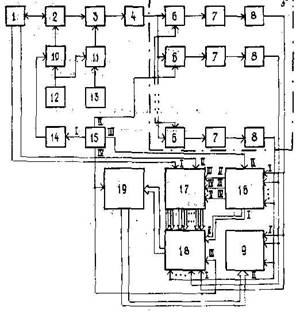
Описание Результат выполнения технологической разработки Импульсно-доплеровская РЛС содержит последовательно соединенные приемопередающую антенну 1 (см. рисунок 1), антенный переключатель 2, первый смеситель 3, предварительный усилитель 4 промежуточной частоты и блок 5 селекции, состоящий изnканалов селекции, гдеn-количество элементов разрешения РЛС по дальности, каждый изnканалов селекции состоит из последовательно соединенных селектора 6дальности, блока 7 частотной селекции и блока 8 цифровой обработки, выход которого является выходом каждого ихnвыходов блока селекции, соединенных с соответствующимnвыходами первой группы входов индикатора 9, а первые входы всехnселекторов 6 дальности объединены и являются первым входом блока селекции 5, а также усилитель мощности 10, второй смеситель 11, генератор высокой частоты 12, кварцевый гетеродин 13, модулятор 14, синхронизатор 15, блок привязки координат 16, блок формирования эталонов 17, блок вычисления вероятностей 18 и решающий блок 19, причем первый выход синхронизатора 15 через модулятор 14 соединен с первым входом усилителя 10 мощности, второй вход которого соединен с выходом генератора 12 высокой частоты, а выход с вторым входом антенного переключателя 2, второй выход синхронизатора 15 соединен с вторыми входами всехnселекторов дальности и являются вторым входом блока селекции, выход кварцевого гетеродина 13 соединен с первым входом второго смесителя 11, второй вход которого соединен с выходом генератора 12 высокой частоты, а выход с вторым входом первого смесителя 3, вторые входы всехnселекторов 6 дальности объединены и являются вторым входом блока 5 селекции, первые группы входов блока 16 привязки координат и блока 18 вычисления вероятностей объединены и каждый вход этих групп входов соединен с соответствующим выходом блока 5 селекции, второй вход блока 16 привязки координат соединен с третьим выходом синхронизатора 15, первая группа выходов с второй группой входов блока 18 вычисления вероятностей, а второй, третий и четвертый выходы соответственно с третьим, четвертым и пятым входами блока 17 формирования эталонов, первый и второй входы которого соединены соответственно с вторым и третьим выходами антенны 1, аl•mспаренных групп выходов сl•mспаренными группами входов блока 18 вычисления вероятностей, гдеlколичество фиксированных ракурсов цели с общей их суммой 360°, аmколичество эталонов возможных боевых порядков воздушной цели, третий вход блока 18 вычисления вероятностей соединен с четвертым выходом синхронизатора 15, а группа его выходов с первой группой входов решающего блока 19, второй вход которого соединен с четвертым выходом синхронизатора 15, группа выходов решающего блока 19 соединена с второй группой входов индикатора 9. ИД РЛС работает следующим образом. Синхроимпульсы с первого выхода синхронизатора 15 поступают на вход модулятора 14, формирующего прямоугольные импульсы, которые подаются на первый вход усилителя 10 мощности. Одновременно на его второй вход поступает сигнал с выхода генератора 12 высокой частоты. В результате на выходе усилителя 10 мощности формируются высокочастотные зондирующие импульсы, которые через антенный переключатель 2 поступают на антенну 1 и излучаются в пространство. Отраженные от цели сигналы через антенну 1 и антенный переключатель 2 поступают на первый вход первого смесителя 3, на его второй вход подается гетеродинный сигнал с выхода второго смесителя 11. Этот сигнал формируется путем суммирования и фильтрации во втором смесителе 11 сигналов с выходов соответственно генератора 12 высокой частоты и кварцевого гетеродина 13. Сигнал с выхода первого смесителя 3 через предварительный усилитель 4 промежуточной частоты поступает на входыnканалов блока 5 селекции. В селекторах 6 дальности осуществляется стробирование сигнала по дальности импульса с второго выхода синхронизатора 15. Причем длительность стробирующих импульсов равна длительности излучаемых импульсов, а количество каналов селекции определяется скважностью излучаемого сигнала. В каждом канале селекции с выхода селектора 6 дальности сигнал через блок 7 частотной селекции, в котором осуществляется выделение участка спектра сигнала, свободного от помеховых составляющих, поступает на вход блока 8 цифровой обработки. В блоке 8 цифровой обработки осуществляется спектральный анализ по алгоритму дискретного преобразования Фурье. Полученные отсчеты спектра в блоке 8 цифровой обработки сравниваются с порогом, в результате чего на выходе каждого изnканалов селекции формируется бинарный сигнал. Эти сигналы поступают на первую группу входов индикатора 9 для их индикации. Однако с помощью данной ИД БРЛС нельзя осуществить распознавание БП ГВЦ и определить ее ракурс относительно БРЛС. В предлагаемой разработке распознавание основано на определении меры близости или соответствия полученного изображения эталонному изображению БП ГВЦ в пространстве признаков. Размерность пространства признаков распознавания определяется количеством элементов разрешения по дальности и доплеровской частоте, занимаемых в пространстве ГВЦ. В результате решения статистической задачи обнаружения сигнала в каждом из элементов разрешения принимается решение о наличии или отсутствии сигнала цели в этом элементе. В этом случае признаки распознавания бинарны и принимают значение 0 или 1. Распознание БП ГВЦ и определение ее ракурса сводится к выбору максимальной апостериорной вероятности соответствия наблюдаемой реализации одному из эталонных изображений, сформированных на основании априорных данных о возможных боевых порядках и учета возможности перехвата ГВЦ под разными ракурсами. Каждое эталонное изображение БП ГВЦ представляет собой номера элементов разрешения по дальности и доплеровской частоте относительно цели, имеющей максимальный доплеровский сдвиг частоты (наименьший угол пеленга). По сигналам, поступающим с первой группы выходов блока 16 привязки координат на вторую группу входов блока 18 вычисления вероятностей, осуществляется совмещение эталонов с изображением БП ГВЦ в координатах дальность доплеровская частота, которое поступает на первую группу входов блока 18 вычисления вероятностей сnвыходов блока 5 селекции. В блоке 18 вычисления вероятностей вычисляется апостериорная поверхность соответствия полученного изображения каждому эталону. Полученные значения апостериорной вероятности через группу выходов блока 18 вычисления вероятностей поступают на решающий блок 19, в котором посредством выбора максимальной апостериорной вероятности определяется боевой порядок ГВЦ и ее ракурс относительно носителя БРЛС. В результате на группе выходов решающего блока 19 формируется цифровой код, соответствующий БП и ракурсу ГВЦ, который поступает через вторую группу входов на индикатор 9. На индикаторе 9 загораются два транспоранта (вид БП ГВЦ и ее ракурс).
Для оценки возможностей распознания БП ГВЦ производится расчет изображений в координатах дальность доплеровская частота для групповой цели. Рис 1. Структурная схема ИД РЛС |
|||
|
Преимущества перед известными аналогами Распознование освано на определении меры близости или соответствия полученного изображения одного из эталонных изображений на основании априорных данных о возможных БП и возможности перехвата ГВЦ под разными ракурсами |
|||
|
Стадия освоения Опробовано в условиях опытной эксплуатации |
|||
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|||
|
Технико-экономический эффект Годовой экономический эффект от внедрения составил 9 млн. долларов США |
|||
|
Возможность передачи за рубеж Возможна передача за рубеж |
|||
|
Дата поступления материала 20.06.2005 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии