ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 02-066-04 |
|
Наименование проекта Датчик вектора силы |
|
Назначение Для испытательной и силоизмерительной техники. |
|
Рекомендуемая область применения Конструкции тензометрических датчиков силы. |
|
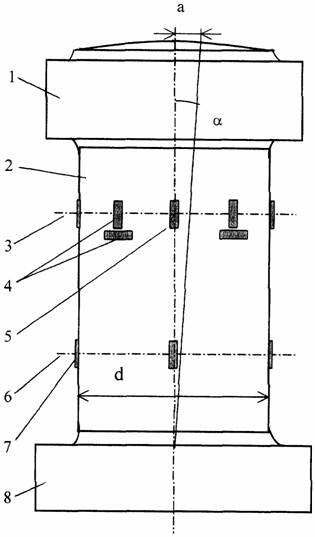
Описание Результат выполнения конструкторской разработки. В тензорезисторном датчике вектора силы, содержащем корпус, цилиндрический упругий элемент с размещенными на нем тензорезисторными мостами для измерения осевой и поперечных составляющих вектора силы, а также силоопорную и силовоспринимающую части, при этом силоопорная часть выполнена диаметром (1,2-1,3)d и высотой (0,3-0,4)d, где d - диаметр упругого элемента. Высота упругого элемента от силоопорной до силовоспринимающей поверхности составляет (2,5-2,7)d, два тензорезисторных моста измерения осевой составляющей вектора силы размещены в поперечном сечении упругого элемента, находящемся на расстоянии (1,85-1,90)d от силоопорной поверхности, со смещением относительно друг друга на 90 o , два тензорезисторных моста измерения поперечной составляющей вектора размещены в этом же сечении также со смещением на угол 90 o относительно друг друга. Кроме того, с целью повышения точности измерения осевой составляющей вектора силы и определения точки его приложения, тензорезиторный датчик вектора силы снабжен двумя дополнительными тензорезисторными мостами измерения поперечной составляющей вектора силы, размещенными в дополнительном сечении на расстоянии (0,8-0,9)d от мостов первого сечения в направлении силоопорной поверхности и имеющие топологию наклейки аналогичных тензомостов в первом сечении. Выполнениетензорезисторного датчика силы с цилиндрическим упругим элементом с указанным соотношением размеров позволяет повысить помехоустойчивость поперечного сечения, в котором размещены тензорезисторы измерения осевой составляющей вектора силы к влиянию неинформативного изгибающего момента от действия поперечных составляющих вектора силы и его внецентрового приложения. Необходимость применения двух тензомостов, повернутых друг относительно друга на 90 o, обусловлена влиянием на показания осевых тензомостов изгибающих компонент вектора силы, действующих под любым азимутным углом, к плоскостям расположения тензорезисторов. Применение тензомостов, измеряющих поперечные составляющие вектора силы и расположенных в дополнительном сечении упругого элемента, позволяет определить эксцентриситет точки приложения силы. Сущность датчика вектора силы поясняется графическим материалом (см. чертеж), на котором приняты следующие обозначения: 1 - силовоспринимающая часть упругого элемента; 2 - цилиндрический упругий элемент; 3 - первое поперечное сечение; 4 - тензомосты осевых составляющих вектора силы; 5 - тензомосты поперечных составляющих вектора силы; 6 - дополнительное сечение упругого элемента; 7 - тензомосты поперечных составляющих вектора силы в дополнительном сечении; 8 - силоопорна часть упругого элемента; d - диаметр упругого элемента: a - угол, под которым сила воздействует на чувствительный элемент датчика; а - эксцентриситет (расстояние от оси датчика до точки приложения вектора силы). Предложенная конструкция датчика силы работает следующим образом. При воздействии на датчик вектора силы под углом a упругий элемент 2 испытывает как сжимающее, так и изгибающее воздействие данного вектора. Сжатие чувствительного элемента по оси воспринимается тензорезисторными мостами 4, расположенными в сечении 3 на расстоянии (1,85-1,90)d от силоопорной части датчика. Тензомосты 4 дублируют друг друга, что повышает достоверность и надежность измерения осевой составляющей вектора силы. Под воздействием поперечной составляющей вектора силы, появляются изгибающие моменты, величина которых измеряется тензорезисторами мостов 5 и 7, расположенными в основном 3 и дополнительном 6 сечениях соответственно, по показаниям которых определяют эксцентриситет точки приложения вектора силы к упругому элементу 2 датчика. Из анализа результатов испытаний экспериментальных образцов заявляемого датчика установлено: - нелинейность и гистерезис выходного сигнала датчика при измерении осевой нагрузки не превышает 0,07-0,1%; - величина среднеквадратичного отклонения случайной составляющей погрешности каналов измерения осевой составляющей вектора силы не превышает 0,12%; - нелинейность и гистерезис выходного сигнала канала измерения поперечных составляющих вектора силы датчиков находятся в пределах: 0,07-0,54% и 0,09-0,68% соответственно для основных (первое поперечное сечение) и дополнительных (второе сечение) тензомостов. Таким образом, категория точности экспериментальных образцов датчика вектора силы составляет: - по каналам измерения осевой составляющей вектора силы - 0,15; - по каналам измерения поперечных составляющих вектора силы - 1,0.
|
|
Преимущества перед известными аналогами Обеспечивает высокоточное и надежное измерение вектора силы и определение точки ее приложения (эксцентриситета) относительно оси датчика. |
|
Стадия освоения Изготовлен опытный образец. Образец прошел испытания на подтверждение метрологических характкристик в СНИИМ (г. Новосибирск). |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Категория точности экспериментальных образцов датчика вектора силы составляет:- по каналам измерения осевой составляющей вектора силы - 0,15; - по каналам измерения поперечных составляющих вектора силы - 1,0. |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 06.10.2004 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2026 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии