ПОДРОБНАЯ ИНФОРМАЦИЯ
Заявку на получение дополнительной информации по этому проекту можно заполнить здесь.
|
Номер 02-106-03 |
|
Наименование проекта Устройство для управления колесным транспортным средством |
|
Назначение Для управления поворотом безрельсовых колесных транспортных средств |
|
Рекомендуемая область применения Конструирование безрельсовых колесных транспортных средств |
|
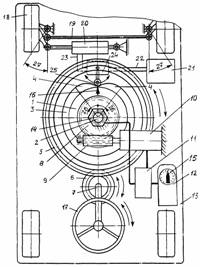
Описание Результат выполнения конструкторской разработки. Устройство предназначено для управления колесным транспортным средством. Корпус 1 (см. рисунок)
имеет ось вращения 2, вокруг которой свободно поворачивается. Наружная поверхность корпуса 1 выполнена цилиндрической, состоящая из участка 3, выполненного по дуге окружности с центром на оси вращения , и двух симметричных криволинейных участков 4, образующих выемку. Концентрично относительно оси 2 вращения корпуса расположено кольцо 5. На кольце выполнен зубчатый венец, входящий в зацепление с шестерней 6, установленной на валу рулевого колеса 7. На корпусе 1 соосно с ним установлено червячное колесо 8, входящее в зацепление с черв ком 9, находящимся на валу управляющего двигателя 10. Управляющий двигатель 10 получает питание от блока управления 11, связанного с датчиком отклонения направления движения от заданного, выполненного в виде приемника 12 спутниковой навигационной системы, жестко укрепленным на кузове 13 транспортного средства. Приемник 12 спутниковой навигационной системы предназначен для пропорционального преобразования отклонения от заданного направления движения колесного транспортного средства в электрический сигнал. На кузове 13 транспортного средства укреплен датчик угла поворота 14, связанный с осью 2 корпуса 1. Датчик угла поворота 14 определяет угол поворота корпуса 1 относительно кузова 13 и электрически связан с блоком управления 11. Червячное колесо 8, черв к 9, управляющий двигатель 10, блок управления 11 и датчик угла поворота 14 образуют систему слежения по угловому перемещению между направлением движения 15, определяемым приемником 12 спутниковой навигационной системы и направлением продольной оси 16 корпуса 1 таким образом, чтобы эти два направления 15 и 16 совпадали при выполнении любых маневров мобильной машиной. На рулевом валу 7 установлено рулевое колесо 17. Управляемые колеса 18, связанные между собой системой т г и рычагов общепринятой конструкции 19, управляются исполнительным цилиндром 20 сервопривода, например, гидравлического типа. Насос 21 сервопривода, приводимый от основного двигателя , связан с исполнительным цилиндром 20 системой гибких трубопроводов 22 и 23 через управляющий механизм 24 сервопривода, расположенный на кольце 5. Управляющий механизм 24 имеет золотник 25, подпружиненный к наружной поверхности корпуса 1. При относительном повороте кольца 5 относительно корпуса 1 золотник 24 поворачивается в ту или иную сторону, обеспечивая исполнительным цилиндром 20 поворот управляемых колес на угол, пропорциональный углу поворота золотника 25. Поворот золотника 25, соответствующий движению по участку 4 (угол 26), соответствует повороту управляемых колес на угол 27, максимально возможный. Перед началом движения приемник 12 спутниковой навигационной системы устанавливается в один из двух режимов работы: режим компаса или режим движения по заданной ранее в памяти приемника траектории, ориентированной относительно окружающей среды. В случае появления угла рассогласования - отклонения текущего направления продольной оси кузова 13 транспортного средства от требуемого (заданного режимом компаса для прямолинейного движения или текущего направления траектории в режиме движения по произвольной траектории) приемником 12 спутниковой навигационной системы подается на блок управления 11 электрический сигнал, величина и направление которого завис т от величины и направления угла рассогласования. В соответствии с полученным сигналом блок управления 11 включает управляющий двигатель 10 и через механическую передачу, а именно червячное колесо 8 и черв к 9, поворачивает корпус 1 на угол, равный по величине углу рассогласования, но противоположно направленный. Предлагаемое устройство обеспечивает повышение точности работы устройства, расширение функциональных возможностей путем обеспечения возможности движения колесного транспортного средства по траектории, близкой к прямолинейной, и по предварительно заданной траектории произвольной формы. |
|
Преимущества перед известными аналогами Расширение функциональных возможностей, обеспечивающих движение машины по траектории произвольной формы |
|
Стадия освоения Опробовано в условиях опытной эксплуатации |
|
Результаты испытаний Технология обеспечивает получение стабильных результатов |
|
Технико-экономический эффект Повышение точности работы устройства в 2 раза |
|
Возможность передачи за рубеж Возможна передача за рубеж |
|
Дата поступления материала 31.10.2003 |
Инновации и люди

У павильонов Уральской выставки «ИННОВАЦИИ 2010» (г. Екатеринбург, 2010 г.)

Мероприятия на выставке "Инновации и инвестиции - 2008" (Югра, 2008 г.)

Открытие выставки "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)

Демонстрация разработок на выставке "Малый бизнес. Инновации. Инвестиции" (г. Магнитогорск, 2007 г.)
2007–2024 © Инновации - Бизнесу. Инновации и инвестиции в прорывные технологии